今日で今度こそ人型になるらしい。

残りの部品と追加機能の部品が来る。

今回は雑誌のほとんどが組み立ての説明だ。
さて、その前置きの追加機能…くそっ、うらやましい内容ばかりだぜ!
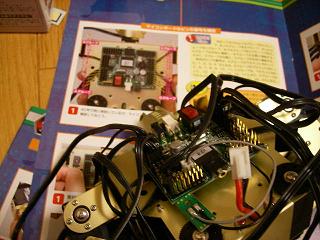
そんな事より組み立てを開始したら、先回の組み立てではマイコンボードが上下逆である事が判明!
無事にマイコンボードは付け直せた。

それはそうと、頭部に発光ダイオードを入れるはずだったのだが、あいにくこの頭部のネジ穴がすごく小さいことを忘れていたよ…。
この部分の作業は後回しだな。

肩の止めネジを締めてゆく。
タップの切ってある(めねじが切ってある)穴にボルトを入れていくのだが、いずれにしてもネジが小さいのでネジ頭を潰したりしないように気をつける。

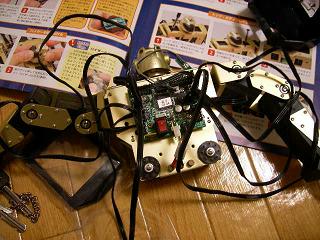
足の残りの部分の組み付け作業を開始。

片足が完成!

両足が完成!

これを本体にくっつけて…。

をを…つながった…。

本体がふにゃふにゃうごいてやりづらいが、何とかネジで固定していく。

配線作業も完了!
コネクタをさすだけと言う点は楽と言えよう。

…で、配線の固定作業…。
あそこを固定、ここを固定、あれを固定、これを固定…。
あああめんどくせー!
配線作業くらい、自分の好きにやらせてもらう!

腕もこれくらいでいいだろ!
もし必要だったらセロテープでも使って止めておけばよかろう!!!
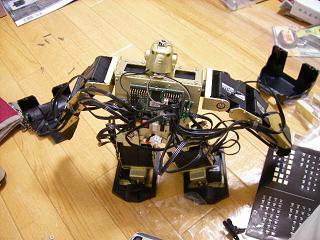
この後、マイコンボードに沸いて出ているような配線を無理やりカバーで押さえつけて封印して完成!

早速テストしてみたいのだが…。
制御するリモコンの電池がない。

電池を買ってこようかな〜とか考えていたら、細いドライバーが台所の工作機械を置いている場所にあったのを思い出した。

頭部も完成だ!
本体のほうは内臓バッテリーに電力が満タンみたいなので、リモコンがなくても「ぴろろん?」とか言っていきなり立ち上がりラリアットを床にかましたりできるらしい。
電源が入ると、キーンと言う音がして、体の関節にブレーキが入って動きにくくなるらしい。

ひとまずしまって、

夜食と一緒に電池を買ってくる!
そして起動!!!
リモコンぽちっ!